









Żeby nie ściągał.
Jednym z układów pojazdu decydujących bezpośrednio o bezpieczeństwie ruchu drogowego jest układ kierowniczy. Prawidłowo funkcjonujący układ kierowniczy zapewnia utrzymywanie się kierunku ruchu jazdy przy wyprostowanych kołach oraz ich samoczynny powrót do takiej pozycji po wykonanym skręcie.
O poprawności działania tego układu decydują jego poszczególne parametry na dane konstrukcyjnie przez producenta pojazdu. Nawet ich nieznaczne odchylenia mają istotny wpływ na tzw. kierowalność pojazdem. Dlatego też muszą być one okresowo sprawdzane i w razie konieczności regulowane. Producenci pojazdów określają dla każdego układu kierowniczego odpowiednie wartości poszczególnych parametrów geometrii oraz ich dopuszczalne odchyłki.
Do przeprowadzenia kontroli parametrów ustawienia geometrii kół i wykonania ewentualnych regulacji konieczne jest posiadanie odpowiednio przygotowanego stanowiska diagnostycznego oraz specjalistycznego urządzenia kontrolno-pomiarowego. Samo stanowisko musi zapewniać odpowiednią płaskość i zachowanie poziomu jednocześnie dla wszystkich czterech punktów podparcia pojazdu. Dopuszczalne przy pomiarze parametrów geometrii ustawienia kół odstępstwa dotyczące wypoziomowania stanowiska nie mogą być większe niż 1 mm na 1m długości dla całej powierzchni stanowiska lub 1 mm pomiędzy punktami spoczynkowymi dla kół (obrotnicami dla kół osi przedniej i płytami rozprężnymi dla kół osi tylnej) lewej i prawej strony i 2 mm między przednimi, a tylnymi (również przy pomiarze po przekątnej).
Do pomiaru parametrów i regulacji geometrii stosuje się odpowiednio przygotowane stanowisko kanałowe lub najazdowy podnośnik diagnostyczny (czterokolumnowy lub nożycowy). Zarówno stanowisko kanałowe, jak również i podnośnik musi posiadać odpowiednie wyposażenie diagnostyczne, czyli obrotnice pod koła przednie, płyty rozprężne kół tylnych oraz dźwignik osi suwany wzdłuż kanału, czy płyt najazdowych podnośnika lub dodatkowy dźwignik nożycowy wbudowany w płytach najazdowych podnośnika, do wykonywania kompensacji bicia kół metodą tradycyjną.
W celu uzyskania wiarygodności wykonywanych pomiarów parametrów geometrii ustawienia kół i osi pojazdu i zapewnienia odpowiedniej dokładności oraz prawidłowego przeprowadzenia ewentualnych regulacji konieczne jest właściwe przygotowanie pojazdu. Podstawową czynnością jest tu sprawdzenie ciśnień w kołach. Muszą być one zgodne z zaleceniami producenta pojazdu. Kolejną istotną kwestią jest sprawdzenie stanu technicznego układu kierowniczego, ponieważ przeprowadzanie pomiarów parametrów geometrii kół i osi w pojeździe z nadmiernymi luzami układu kierowniczego pozbawione jest jakiegokolwiek sensu.
Bardzo istotne przy pomiarze jest także, zwłaszcza w nowych modelach niektórych pojazdów określenie wysokości nadwozia względem podłoża, ponieważ obniżenie zawieszenia pojazdu zmienia w istotny sposób wielkość poszczególnych parametrów geometrii kół.
Ostatnią czynnością przed przystąpieniem do wykonywania właściwych pomiarów jest określenie wartości stopnia ugięcia zawieszenia pojazdu. Jest to istotne ponieważ producenci pojazdów określają konkretną jego wartość w trakcie pomiaru. W zależności od producenta różne są zalecenia w stosunku do samego wykonania pomiaru stopnia ugięcia oraz metod obciążenia pojazdu w celu wykonania tego pomiaru.
Po wykonaniu wszystkich zalecanych czynności wstępnych zalecanych przez producenta pojazdu wprowadzany jest on na stanowisko kontrolno-pomiarowe w taki sposób, aby koła przedniej osi umieszczone były na obrotnicach, umożliwiających ich swobodny skręt, a koła tylnej osi znajdowały się na płytach rozprężnych, umożliwiających swobodne przemieszczanie w poziomie, zapewniające odpowiednie ułożenie się zawieszenia.
Pomiaru parametrów geometrii ustawienia kół i osi pojazdów dokonać można przy użyciu przyrządów kontrolno-pomiarowych różnych konstrukcji. Różnią się one między sobą zasadą działania i stopniem automatyzacji poszczególnych operacji obsługowych.
Najstarszą wersją konstrukcyjną, a zarazem zdecydowanie najprostszym w działaniu jest rozwiązanie przyrządu optyczno-mechanicznego. W tego typu urządzeniach wykorzystywane jest zjawisko zmiany kąta padania wiązki świetlnej, wysyłanej z założonego na badanym kole projektora na odpowiedni ekran pomiarowy. W obecnie produkowanych jeszcze urządzeniach tego typu wiązka świetlna została zastąpiona przez wiązkę lasera. Urządzenia tej konstrukcji wymagały zdecydowanie większego zaangażowania przez obsługującego przyrząd diagnostę oraz większej znajomości zagadnień związanych z teorią dotyczącą geometrii kół i osi pojazdów, a przede wszystkim były bardziej podatne na błędy pomiarowe spowodowane niewłaściwym, zbyt mało dokładnym wykonywaniem poszczególnych czynności obsługowych w trakcie pomiaru.
Kolejną wersją konstrukcyjną przyrządów do pomiaru geometrii kół były komputerowe rozwiązania urządzeń. Są one zdecydowanie praktyczniejsze w użyciu, ze względu na fakt, że diagnosta przeprowadzający pomiar prowadzony jest przez poszczególne jego fazy poprzez odpowiedni program komputerowy. Zastosowane w tych urządzeniach odpowiednie procedury programowe automatycznie kontrolują poprawność wykonywanych, kolejnych czynności obsługowych, zapobiegając tym samym przed popełnieniem ewentualnych błędów.
Tego typu urządzenia w porównaniu z urządzeniami optyczno-mechanicznymi ze względu na zastosowaną w nich już technologię mikroprocesorową mają wbudowaną bazę danych parametrów wzorcowych (zalecanych przez producentów pojazdów) obsługiwanych pojazdów. W komputerowej bazie danych dostępne są również graficzne obrazy punktów regulacyjnych oraz zalecany wartości ugięcia zawieszenia i sposoby obciążania pojazdu w trakcie wykonywania pomiaru. Umożliwiają one również wydruk protokołu pomiarowego.
Urządzenia komputerowe są w zdecydowanej większości przyrządami czterogłowicowymi, umożliwiającymi dokonywanie pomiaru parametru, jakim jest nierównoległość osi. Tego typu przyrządy wymagane są przy pomiarze w trakcie badań technicznych wykonywanych na stacjach kontroli pojazdów.
Obecnie w urządzeniach komputerowych każda z czterech głowic pomiarowych posiada dwa czujniki położenia (całe urządzenie więc posiada 8 czujników tego typu). W pierwszych wersjach konstrukcyjnych tej grupy urządzeń przyrządy posiadały sześć czujników tego typu, po dwa w każdej z głowic przednich i po jednym w tylnych głowicach pomiarowych. W efekcie nie umożliwiały wykonywania pełnych pomiarów dla pojazdów ze skrętną osią tylną. Starsze konstrukcje urządzeń komputerowych do pomiaru kątów poziomych wykorzystywane były czujniki rezystancyjne. Informacje o wzajemnym położeniu względem siebie czujników kątów poziomych przekazywane były z użyciem elastycznych cięgien (linek) opasających pojazd wokół i łączących wszystkie czujniki rezystancyjne czterech głowic pomiarowych.
Najnowsze wersje konstrukcyjne urządzeń komputerowych wykorzystują czujniki optyczne, czyli tzw. kamery CCD, emitujące i odbierające programowanie podczerwone. W tej konstrukcji mierzony pojazd również opasany jest wokół, lecz już nie za pomocą linek, lecz poprzez wytwarzanie tzw. elektronicznej ramy wykorzystującej promieniowanie podczerwone.
Starsze konstrukcje urządzeń komputerowych do pomiaru geometrii kół głowice pomiarowe zasilane były przewodowo, tzn. pomiędzy wszystkimi czterema głowicami pomiarowymi zakładanymi na zaciski umieszczone na kołach pojazdu i centralną jednostką komputerową konieczne było połączenie przewodowe, którymi dostarczane było z urządzenia do głowic napięcie zasilające i zbieranie z nich do urządzenia sygnały transmisyjne ze zbieranymi do przetworzenia informacjami o mierzonych parametrach.
W najnowszych wersjach konstrukcyjnych wykorzystywane jest zasilanie akumulatorowe głowic pomiarowych, których baterie ładowane są po odwieszeniu głowic pomiarowych na stanowisko odkładcze urządzenia. W przypadku konieczności dokonywania pomiaru z wyładowanymi akumulatorami głowic pomiarowych istnieje również możliwość prowadzenia pomiarów poprzez zasilanie głowic z wykorzystaniem tzw. przewodów zasilania awaryjnego. Przekazywanie informacji o mierzonych parametrach geometrii z głowic pomiarowych do urządzenia realizowane jest obecnie drogą radiową.
Najnowsze konstrukcje przyrządów komputerowych posiadają wiele ciekawych funkcji skracających cały proces pomiarowy i zapewniających zdecydowanie większy komfort pracy. Jedną z nich jest wprowadzenie nowej metody wykonywania kompensacji bicia kół, która jest czynnością niezbędną w trakcie każdego pomiaru, a zarazem bardzo czasochłonną, przynajmniej przy wykonywaniu jej metodą tradycyjna. Celem przeprowadzania kompensacji bicia obręczy jest wyeliminowanie błędów pomiarowych wynikających z odkształcenia obręczy. W najnowszych przyrządach pomiarowych kompensacja może być wykonywana poprzez:
- obrót uniesionego koła o 900,
- obrót uniesionego koła o 1800,
- przetoczenie pojazdu.
Wykonywanie kompensacji poprzez uniesienie i obrót koła o 1800 jest trybem realizowanym w pełnym cyklu pomiarowym i wymaga wykonania jej po kolei dla wszystkich czterech kół. Kompensacja poprzez uniesienie i obrót koła o 900 jest trybem niepełnym i dotyczy jedynie wybranego koła pojazdu.
Najwygodniejszą metodą kompensacji jest ta z zastosowaniem przetoczenia pojazdu. Zapewnia przeprowadzenie pełnego cyklu kompensacji wszystkich kół jednocześnie w trakcie przetoczenia pojazdu do przodu i wstecz o wartość obrotu kół wynoszącą 450.
Kolejną funkcją programową nowoczesnych urządzeń do pomiaru i kontroli geometrii kół i osi pojazdów jest możliwość wykonywania pomiarów pojazdów ospojlerowanych lub posiadających niskie zawieszenie, w których warunkiem wzajemnego komunikowania się głowic pomiarowych urządzenia, założonych na kołach jednej osi jest odpowiedni prześwit pomiędzy ławą pomiarową stanowiska a dolną krawędzią podwozia pojazdu.
W urządzeniach starszych w celu wykonania pomiaru przy tego typu pojeździe konieczne było wykorzystanie specjalnych przedłużaczy umieszczonych pomiędzy zaciskami mocowania do koła, a głowicami pomiarowymi. Wiązało się to z koniecznością dodatkowego zakupu tego typu przedłużaczy (nie są one w wyposażeniu standardowym przyrządu) i zdecydowanie wydłużało to cykl pomiarowy.
W najnowszych urządzeniach wykorzystuje się odpowiednią funkcję programową pozwalającą na pochylenie głowic w celu zapewnienia odpowiedniego prześwitu. Jeden z końców głowicy pomiarowej pochyla się o wartość od 1,5 do 4,5 mm i wykorzystuje się funkcję tzw. elektronicznego poziomowania głowicy pomiarowej, zapewniającą uwzględnienie kompensacji odchylenia głowicy od poziomu.
Kolejną bardzo ciekawą funkcją programową nowoczesnych urządzeń do pomiaru geometrii kół jest kompensacja pomiaru wartości regulowanych. Do wykonania w układzie kierowniczym regulacji odpowiednich parametrów wymagane jest uniesienie pojazdu, co wiąże się automatycznie ze zwolnieniem obciążenia kół i zmianą ułożenia się elementów zawieszenia. W związku z tym, że powoduje to uzyskanie innych wartości mierzonych parametrów, po dokonaniu pomiaru regulowanych wartości program zapamiętuje je i przelicza w odpowiedni sposób po uniesieniu kół w taki sposób, aby zagwarantować uzyskanie kompensacji bieżących parametrów w oparciu o wartości początkowe, tzn., kiedy koła były dociążone.
W ostatnim czasie pojawiły się najnowszej generacji urządzenia do pomiaru i kontroli geometrii kół pracujące w tzw. technologii 3D, wykorzystującej zjawisko trójwymiarowego modelowania parametrów podwozia pojazdu.
W urządzeniach tego typu wyeliminowano niedoskonałości technik pomiarowych urządzeń poprzednich generacji , czyli tych w których stosowane były głowice aktywne (tzn. w których znajdowały się elementy i podzespoły biorące udział w bezpośrednim rejestrowaniu i przetwarzaniu parametrów pomiarowych). Ze względu na fakt, że w urządzeniach 3D stosowane są głowice pasywne (są to tylko odpowiednie ekrany odbijające wiązkę promieniowania podczerwonego) wyeliminowano między innymi konieczność okresowej kalibracji wynikającej z wpływu warunków otoczenia (drgania, wilgoci) oraz ewentualnych uderzeń głowicy na elementy pomiarowe głowic aktywnych.
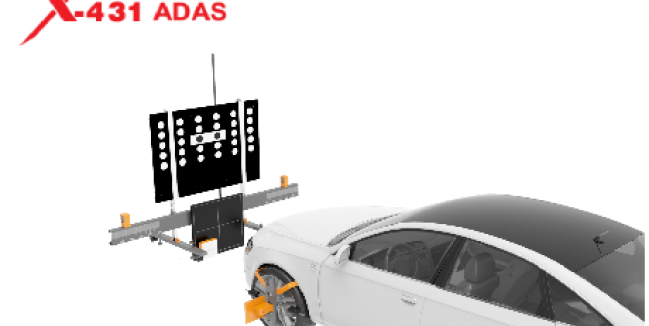
Najistotniejszym elementem całego systemu pomiarowego tego typu urządzeń są kamery o dużej rozdzielczości obrazu. Są one zamontowane na stanowisku, wykonanym w formie dwóch pionowych słupów lub w postaci krzyża umieszczonych z przodu badanego pojazdu, w taki sposób, aby każda z kamer mogła obejmować swoim polem widzenia tarcze refleksyjne (głowice pasywne)przyrządu po jednej stronie pojazdu.
Wokół każdej z kamer urządzenia umieszczone są diody wysyłające promieniowanie światła podczerwonego, skierowane na poszczególne głowice refleksyjne. Tarcze refleksyjne posiadające określoną liczbę większych i mniejszych kropek o bardzo dokładnie określonej wielkości, wykonanych z materiału odblaskowego.
Urządzenia tej generacji wykorzystują w trakcie pomiaru tzw. efekt perspektywy, polegający na względnej zmianie wielkości obserwowanego obiektu w zależności od odległości jego obserwacji. Dzięki zastosowanym odpowiednich algorytmów przeliczeniowych możliwe jest określenie kątów pochylenia tarczy, a tym samym i parametrów geometrii kół.
Największą zaletą urządzeń do kontroli geometrii ustawienia kół i osi pojazdów pracujących w systemie 3D jest bardzo krótki czas pomiaru wszystkich parametrów, nie przekraczający zaledwie kilku minut. Do pełnego pomiaru parametrów wystarcza przetoczenie pojazdu o kilkadziesiąt centymetrów do tyłu i do przodu. Proces wykonywania kompensacji bicia kół wykonywany jest poprzez przetoczenie. W urządzeniach tych w przeciwieństwie do tradycyjnych urządzeń pomiarowych do geometrii w których jako płaszczyznę odniesienia wykorzystywana jest płaszczyzna stanowiska pomiarowego, wszystkie mierzone kąty odnoszą się do płaszczyzny pojazdu, dzięki czemu powierzchnia stanowiska pomiarowego nie musi być aż tak wypoziomowana.